
Yung-Ching Sun
MS ECE (Robotics) at the University of Michigan
About
I am a Master's student in Electrical and Computer Engineering (Robotics track) at the University of Michigan, where I work with Professor Ram Vasudevan in the ROAHM Lab on physically grounded 3D scene reconstruction.
Before that, I earned dual Bachelor's degrees from National Taiwan University, double majoring in Mechanical Engineering and Physics. My undergraduate research experience includes intelligent elderly-care robotics, adviced by Professor Li-Chen Fu at Advanced Control Laboratory, and computational astrophysics with Dr. Hsien Shang at Academia Sinica, Institute of Astonomy and Astrophysics (ASIAA).
I am broadly interested in robust robotic perception and planning, with a focus on developing algorithms that enable robots to achieve human-level perception and understanding of their environments. My current research explores how to integrate robot vision and robot-environment interactions to autonomously generate physically accurate 3D scene representations. In the long term, I aim to enhance robot autonomy and robustness leveraging 3D world models, enabling more robust planning and operation in real-world environments.
News
| Nov. 2025 | Honored to receive the Rackham International Students Fellowship for the 2025-2026 academic year! See the Department announcement here. |
| May 2025 | Presented my work at ICRA 2025 in Atlanta, GA. |
Publications, Presentations, & Workshop Papers
|
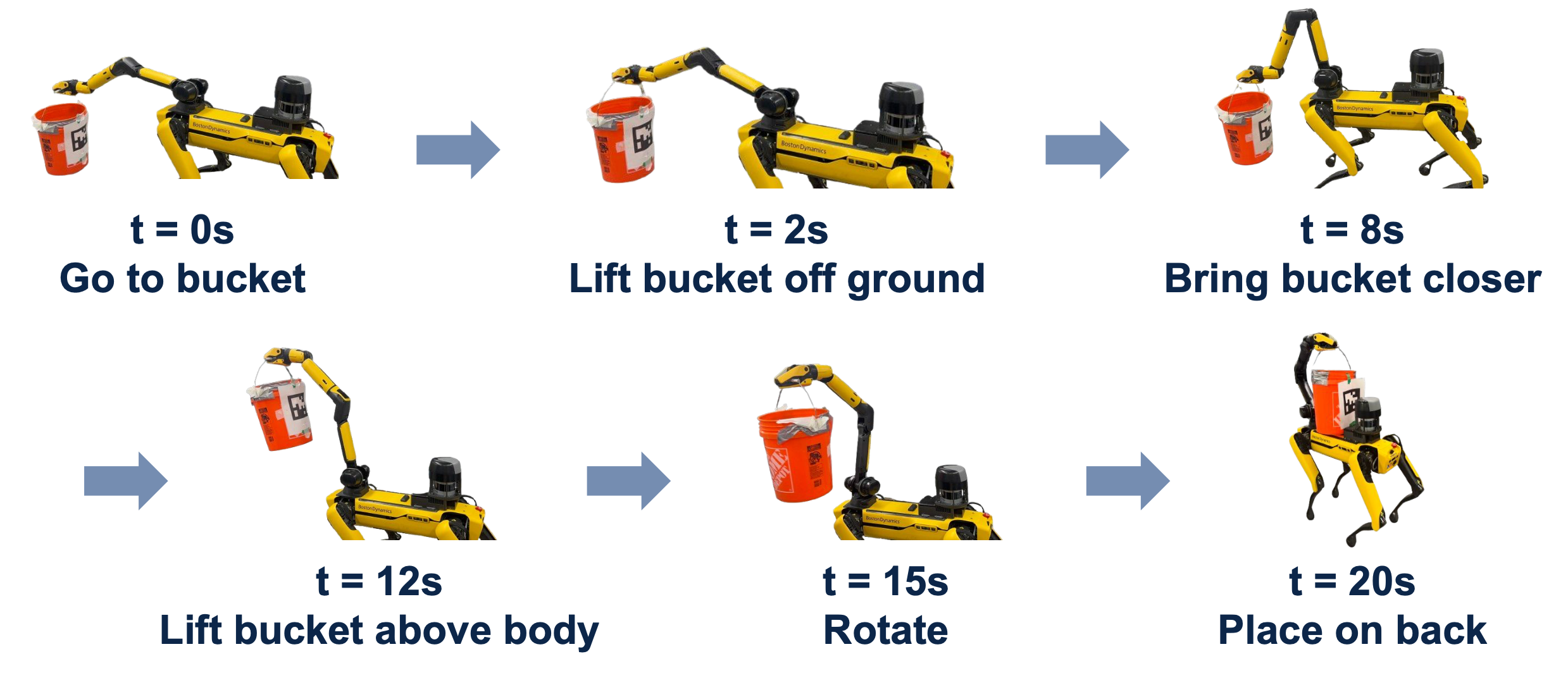
Key Capabilities of Autonomous Mobile Platforms for Maintenance and Monitoring in Manufacturing Environments
[Poster]
[Paper]
[My Final Report]
|
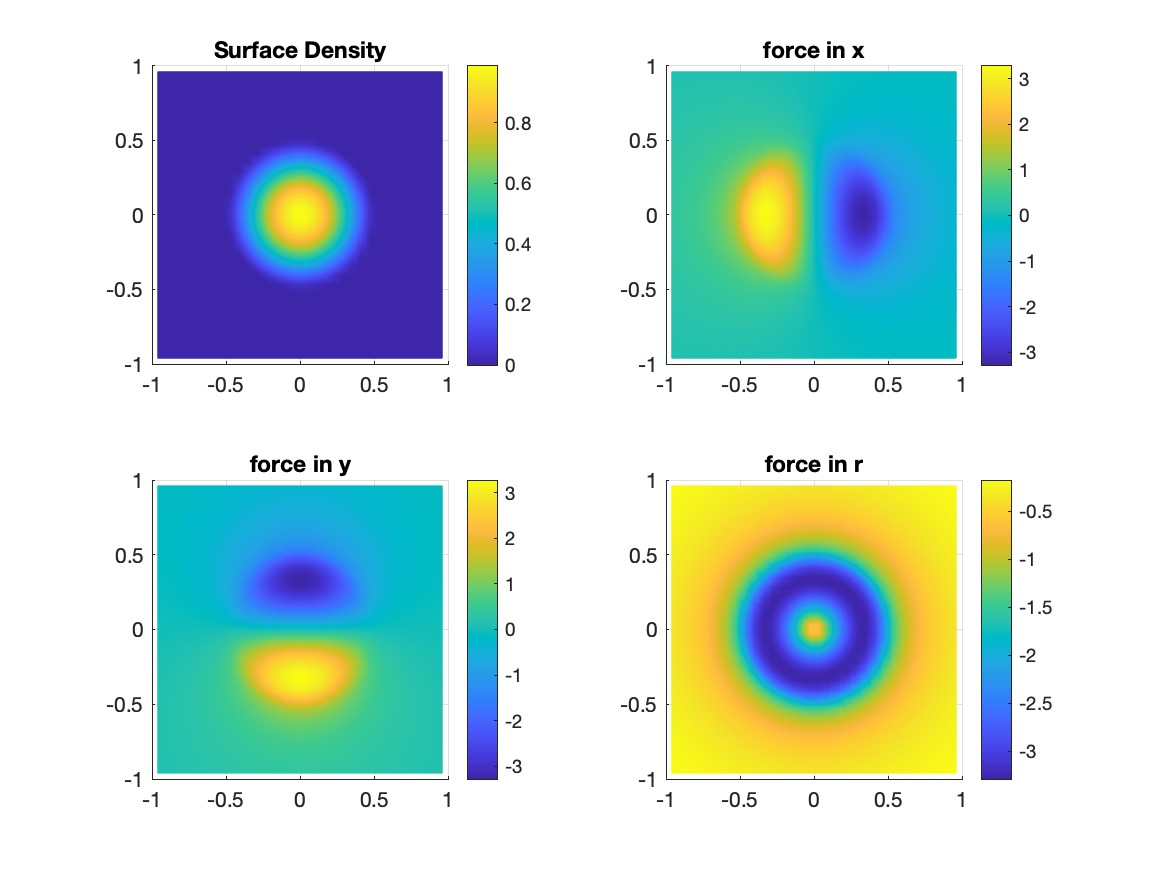
A Hybrid Acceleration for Self-Gravity Calculation in Infinitesimally Thin Disks with Adaptive Mesh Refinement
The Astrophysical Journal Supplement Series (Under review)
|
Selected Projects

Physically Grounded Digital Twin Generation
[
Code and Paper Coming Soon...
]
|

Autonomous Driving Scene Reconstruction via 3D Gaussian Splatting
[
Code
]
[
Poster
]
|
Rapid Motor Adaptation (RMA) for RL-Based Quadruped Locomotion
|
|
Real-Time Visual SLAM for Dynamic Environments
[
Code
]
[
Report
]
[
Poster
]
|

SLAM and Autonomous Exploration for a Differential-Drive Mobile Robot
[
Code
]
[
Report
]
|

Vision-Based Manipulation with an RGB-D Sensor and 5-DOF Robotic Arm
[
Code
]
[
Report
]
|

ANA*: Anytime Nonparametric A* Algorithm
[
Code
]
[
Report
]
|
Experience
|
|
Graduate Research Assistant
ROAHM (Robotics and Optimization for the Analysis of Human Motion) Lab, University of Michigan, Feb. 2025 - Present |
|
|
Graduate Research Assistant
Barton Research Group, University of Michigan, Jan. 2025 - May 2025 |
|
|
Undergraduate Researcher
Advanced Control Lab - Intelligent Robotics Group, National Taiwan University, Sep. 2022 - Aug. 2024 |
|
|
Undergraduate Research Intern
Academia Sinica, Institute of Astronomy and Astrophysics, Jul. 2022 - Jul. 2024 |
|
|
Rocket Avionics Hardware Engineer Summer Intern
Advanced Rocket Research Center, Taiwan, Jul. 2021 - Sep. 2021 |
Education
|
|
University of Michigan - Ann Arbor
M.S. in Electrical and Computer Engineering (Robotics), Aug. 2024 - Present |
|
|
National Taiwan University
B.S.E in Mechanical Engineering & B.S. in Physics, Sep. 2019 - Jun. 2023 |
Honors & Awards
|
Rackham International Student Fellowship Rackham Graduate School, University of Michigan, Nov. 2025 |
|
Academia Sinica Undergraduate Research Scholarship Academia Sinica, Institute of Astronomy and Astrophysics, Sep. 2022 |